It is generally accepted that the magnetic field lines come out of the south magnetic pole and converge in the north forming closed curves. The vertical plane passing through such a magnetic needle is called plane of the magnetic meridian.
The angle at which the magnetic meridian deviates from the true meridian is called magnetic declination, or compass declination.
Magnetic declination, calculation for the year of navigation. MP, MK, WMD.
Magnetic declination- W, E change is multiplied by the difference of years, taking into account the sign.
Magnetic heading - an angle in the plane of the true horizon, counted from the northern part of the magnetic meridian clockwise to the bow of the ship's centreline;
Magnetic bearing– angle in the plane of the true horizon, counted from the northern part of the magnetic meridian clockwise to the direction to the landmark.
Reverse magnetic bearing- an angle that differs from the MP by 180.
Ship's magnetism and its influence on the readings of the magnetic compass. Compass meridian Deviation of the magnetic compass. compass meridian. Deviation of the magnetic compass. Deviation table. KK, KP, OKP. Relationship between compass and magnetic heading.
The steel frame of the vessel, its plating acquire magnetic properties from the moment of construction and are preserved for years. The compass is influenced by the magnetic forces of magnetically hard and soft iron, and their action is different. In addition, the compass is affected by the forces arising from the magnetic field of operating ship units.
The angle in the plane of the true horizon of the observer between the magnetic and compass meridians is called the deviation of the magnetic compass, this angle is measured from the nordic part and the magnetic meridian to Ost or to W from 0 to 180. According to the nature of occurrence, semicircular, quarter and roll deviations are distinguished.
Semicircular - is created by magnetically hard iron, quarter - by soft, roll occurs during pitching. Compass meridian - an imaginary line of intersection of the plane of the true horizon of the observer with the plane of the compass meridian passing through a given point on the ship.
Compass heading - the angle at the center of the compass, counted from the north part of the compass meridian to the direction of the bow of the center plane of the vessel clockwise from 0 to 360. Compass bearing - the angle at the center of the compass, counted from the north part of the compass meridian to the direction of the object from 0 to 360.
The reverse compass bearing is an angle that differs from the CP by 180. To ensure the reliable operation of the compass, the deviation is destroyed. The principle of destruction is to compensate for the magnetic field of the vessel near the compass (magnets are installed near the compass - destroyers and soft iron bars). It is completely impossible to destroy it, therefore, after carrying out the work, the residual deviation is determined and a table of its values is compiled.
The calculation of true directions from known compasses is called correctiontowardsny(rooms). Correction of the points is necessary for plotting a course or bearing line on the map. By choosing b from the table using the known QC, one can first find the magnetic directions using dependence (15), and then the true ones using relation (13). Substituting (15) into (13), we obtain formulas for correcting points
![]() (23)
(23)
The calculation of compass directions from known true ones is called translationtowardsny(rooms). Rumba translation is necessary, for example, to determine the ship's course by compass in order to move from one point to another. First, according to (14), the magnetic course is calculated
MK=IR - d,
and then by (16) find the compass heading
The deviation is selected from the table according to the magnetic course, given that the MC and CC differ by a small amount. In cases where the deviation exceeds 4°, and the tabular interval is 1°, it is advisable to make a second approximation. To do this, after calculating the QC, they again enter the deviation table already with the obtained value of the compass course, find b and calculate the compass course a second time.
Substituting (14) into (16), we obtain the dependences of the direct translation of points
![]() (24)
(24)
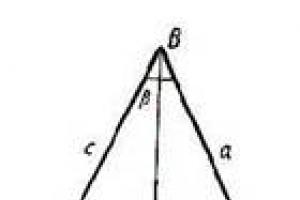
The algebraic sum of declination and deviation geometrically represents (Fig. 15) the angle in the horizon plane between the northern part of the true and compass meridians, called the compass correction (ΔMK),
ΔMK = d + δ. (25)
If the northern part of the compass meridian deviates to E from the true one, the compass correction is positive, if to W it is negative.
Taking into account dependence (25), from (23) and (24) we obtain formulas for correcting and translating points with a known compass correction:
![]() (26)
(26)
![]() (27)
(27)
All problems of correcting and translating points can be checked graphically (Figure 16).
To do this, for example, first build the true meridian, then by known values (ΔMK, d or IR) draw other lines (compass, magnetic meridian or heading) and determine unknown values. The location of the meridians relative to each other is determined by logical reasoning, taking into account the sign and magnitude of δ, d or ΔMK. Graphic control is carried out in order to eliminate errors in signs.
Correction and translation of points is most often done by calculating the compass correction using formulas (26) and (27), for which the declination value is removed from the map, and the deviation is selected from the table.
The reliability of the compass correction determines the accuracy of determining the true directions, and, consequently, the accuracy of the ship's wiring. Hence the need for systematic monitoring of the correction. The compass correction is determined by comparing the true and compass directions. To this end, it is necessary to know the value of the true heading or bearing and at the same time measure the corresponding compass heading. From (26) we have that
![]() (28)
(28)
To determine ΔMK, methods similar to those for determining deviation can be used: by bearings of the alignment, the true direction of which is given on the map or can be removed from the map; according to the bearing of a distant object, when the position of the ship is known with high accuracy, and the object is plotted on the map, according to the bearings of celestial bodies. On some river boats, where it is not possible to measure the bearing from a magnetic compass, the correction can be determined by comparing the IR and CC when sailing along the alignments, the direction of which is known. To do this, being on the alignment line, lead the ship with its nose exactly on the alignment marks and notice the compass course.
The correction of the magnetic compass can also be obtained by comparison with the gyrocompass, if its correction is known:
ΔMK = GKK - KK + ΔGK. (29)
For each determination of the magnetic compass correction, the deviation should be calculated using the formula
δ = ΔMK - d (30)
to control the validity of the table.
Compass correction. Calculation and accounting of the compass correction. Definition and correction of points.
The rhumb system for counting directions came into our century from the era of the sailing fleet. In it, the horizon is divided into 32 points, which have the corresponding numbers and names. One rhumb is equal to 11.25 o. The directions N, S, E, and W are called the main directions, NE, SE, SW, NW are called quarter directions, and the remaining 24 are called intermediate directions. Even intermediate points have names from the nearest major and quarter points, for example, NNW, WSW, ESE, etc. The names of odd intermediate points include the Dutch prefix "shadow" (ten), which means "to", for example, NtE reads as "north-shadow-east" and means that the direction of N is "shifted" by one rhumb to E, etc.
The rhumb counting system is used to indicate the directions of wind, current and waves - this is the traditional counting system.
Magnetic declination d- this is the angle in the plane of the true horizon between the geographical (true) and magnetic meridians.
For 1985, d = 1 o W, annual change Dd = 0.2 o, declination in 2000 - ?
Dt = 2000-1985 = 15 years
d 2000 = d + DdDt = +2 o E
Two different compasses are usually installed on the ship: the main compass for determining the position of the vessel and the directional compass for steering the vessel. The main compass is installed in the ship's DP, in a place that provides all-round visibility and maximum protection from ship's magnetic fields. Usually this is the navigation bridge of the ship.
Deviation calculation:
d i = MP - KP i
And they make a table or graph of the deviation as a function of the compass heading.
If a comparison is made between the directional and main magnetic compasses or the directional and gyrocompass, then the following relations are valid:
KKp + dp = KKgl + dgl
KKp + dp = GKK + DGK - d
Nautical units of length and speed. Correction and lag factor. Determination of the distance traveled by ROL.
The metric system is inconvenient for measuring distances at sea, since in the process of navigation one has to solve problems related to measuring angles and angular distances.
For the Krasovsky reference ellipsoid, the length of one minute of such an arc is expressed by the following formula:
D = 1852.23 - 9.34cos2f
The standard nautical mile corresponds to the length of a minute of the meridian of the Krasovsky reference ellipsoid at a latitude of 44 0 18 '. It differs from the values at the poles and the equator by only 0.5%.
One tenth of a nautical mile is called a cable (kb) 1kb = 0.1 miles = 185.2 m
For a unit of speed in marine navigation, a knot (kt) is taken - 1kt = 1 mile / hour.
The transition from speed in knots to speed in cables per minute is made according to the formula:
V kb / min \u003d V knots / 6
In calculations related to wind speed and in other cases, the unit meter per second (m/s) is used - 1m/s = 2kt.
The distance S o from some zero is fixed by a special counter, and its instantaneous value at the moment is called the lag reading (LL). The distance traveled by the vessel is determined using the relative lag as the difference between its successive readings (ROL) at the time points taken from the lag counter:
ROL = OL i+1 - OL i
Log, like any device, determines the speed with an error. The systematic error in the lag readings can be compensated by the lag correction D L, which has the opposite sign. This correction, expressed as a percentage, is called the lag correction. It is calculated according to the following formulas and can have both positive and negative signs:
D L \u003d (S o - ROL) / ROL * 100%
D L \u003d (V o - V l) / V l * 100%
S o is the actual distance traveled by the vessel.
V o and V l - the speed of the vessel relative to the water and shown by the log.
Instead of a correction, a lag coefficient is often used:
K l \u003d 1 + D L / 100 \u003d S l / ROL
S l \u003d ROL * K l
The speed of the vessel and the correct operation of the log, that is, the correction of the log, is determined during sea trials.
Classification of charts used in navigation. The content of the cards. Guides and manuals for swimming. SOLAS requirements for charts and aids for sailing.
Nautical charts and other navigation aids for all areas of the oceans and seas are published by the General Directorate of Navigation and Oceanography (GUNiO), and in foreign countries - by hydrographic services (departments).
Nautical charts are published mainly in the Mercator projection and, according to their purpose, are divided into three types:
Navigation instruments are designed to maintain dead reckoning and determine the position of the vessel at sea. Marine navigation charts include general navigation, radio navigation, etc.
Special designed to solve a number of problems of navigation when using special technical means. Special ones include roll and route maps, etc.
Auxiliary and reference nautical charts, under the name of which various cartographic publications of GUNiO are combined. This group includes: grid maps, maps in gnomonic projection for laying a great circle arc, radio beacons and time zone radio stations, etc.
General navigation charts are the main subgroup of nautical charts that ensure the safety of navigation. They most fully reflect the bottom relief, the nature of the coasts and the entire navigation environment (lights, signs, buoys, fairways, etc.).
Depending on the scale, general navigation mar maps are divided into: general, having a scale from 1:1000000 to 1:5000000; travel - from 1:100000; private - from 1:25000 to 1:100000; plans - from 1:100 (during the production of various hydrographic works) to 1:25000.
Private multiples contain all navigational details. In addition to the maps, various manuals and reference books are published, from which you can draw a lot of useful, necessary information. Such aids include navigation manuals (pilots), which contain all the information necessary for the navigator, including recommended routes and advice on orientation when sailing near the coast.
For the selection of maps and manuals, a special "Catalogue of Maps and Books" is published. All cards and benefits have their own number, which is called admiralty.
Map numbers consist of five digits, which mean: the first is the ocean or part of it (1 - the Arctic Ocean, 2 and 3 - the North and South Atlantic, 4 - the Indian Ocean, 5 and 6 - the South and North Pacific Ocean), the second is the scale of the map (each group corresponds to a scale number from 0 to 4), the third is the area of the sea within which the map is located, the fourth and fifth are the serial number in this area.
Nautical charts and grid charts have numbers whose first digit is 9. The second digit designates the ocean or part of it; the third digit is the scale; the last two are the serial numbers of the map in the ocean.
6. The ability to determine the drift of the ship. Accounting for drift and current in dead reckoning, dead reckoning accuracy.
drifting the vessel is called the deviation of a moving vessel from the line of the intended course under the influence of wind and wind waves. The direction of the wind is determined by the point on the horizon from which the wind is blowing (the wind blows into the compass) and is expressed in rhumbs or degrees.
Drift occurs under the influence of the pressure force of the oncoming air flow on the surface of the vessel. The speed and direction of this flow corresponds to the speed vector of the apparent (observed) wind.
Where n is the true wind speed vector; V is the ship's velocity vector; W is the apparent wind speed vector.
Asymmetric deviations from the course under the influence of gusts of wind, wave impacts, rudder deflections cause the ship to yaw, which can be both downwind and upwind.
Speaking about the definition and accounting of drift, the term "drift" will mean the resulting deviation of the ship from the line of the true course.
Full strength A apparent wind pressure is applied to the sail center of the ship's surface and directed downwind.
In general, strength A is defined by the equality:

Where C q is the drag coefficient of the ship's surface.
Corner a between the true course line and the ship's track is called drift angle.
The angle between the northern part of the true meridian and the drift track is called track anglea
.
, 
Corner a has a "+" sign - if the wind blows to the left side, and "-" - if to the right.
To take into account drift during laying, it is necessary to know the drift angle. The drift angle can be determined from observations or calculated using formulas, specially compiled tables or nomograms.
Accounting for drift when using automatic calculation of coordinates is reduced to the introduction of an additional course correction equal to the ship's drift angle. To do this, the course correction D Cl is set on the device, equal to the algebraic sum of the compass correction and the drift angle: 
7. Navigation contour line, position line, position strip. UPC positioning of the vessel on two lines of position.
The locus of points corresponding to a constant value of the navigation parameter is called navigation contour. In navigation, the following navigational parameters and their corresponding isolines are used to determine the position of the ship:
Bearing. On the ship, the true bearing (IP) of object A was measured, equal to a. Having plotted the AD bearing line on the map, it can be asserted that the ship was on this line at the time the bearing was taken. A straight BP line that meets the conditions of the problem, on which the ship was at the time of observation, will be called the bearing isoline or iso bearing.
Distance. Measured distance D between the ship and landmark A. In this case, the ship will be located on a circle with radius D centered at point A. This circle will be called the distance isoline or isostage.
horizontal angle. If the horizontal angle between objects A and B is measured, equal to a, or this angle is calculated as the difference of two bearings  . This circle is called the isoline of the horizontal angle or isogon.
. This circle is called the isoline of the horizontal angle or isogon.
Distance difference. Some radio navigation systems measure the difference in distance between two landmarks. Then the isoline of the distance difference will be hyperbola.
The generalized theory of position lines made it possible to expand the method of obtaining the observed coordinates, which can be divided into three groups: graphical (using maps with grids of isolines and direct laying of isolines), graphic-analytical (generalized method of position lines and using special tables of defining points for constructing position lines) , analytical (direct algebraic methods for solving equations and calculations using the method of chords or tangents).
Under the influence of random measurement errors, the displacement of each line of position is characterized by a linear value D n, which is characterized by a linear position line error m D n, and the location error, which is the result of random errors in both lines of position, is characterized by the area of the parallelogram formed by two parameters m D n 1 And m D n 2.
The general procedure for calculating the parallelogram of the ship's observation error under the action of random errors is as follows:
Set by the mean square measurement errors for specific sailing conditions mv1 And m v2.
Calculate the possible offset of each position line  ;
;  ;
;  ;
;  .
.
Lay off from the obtained observation along the normal to the line of position (in the direction of the gradients) the resulting displacements and build a parallelogram abcd. The probability of finding the vessel in the area of the parallelogram is about 50%; if we take 2m for calculation, then the probability increases to 95%, and if we accept the marginal error of 3m, then the probability increases to 99%.
For the convenience of analysis, it is more expedient to estimate the accuracy of the observation of the ship's position not by the area, but by one number. The mean square error of the observed place M is taken as the radius of the circle, covering the error ellipse. This radius is:

The probability that the ship's position is within the radius of the circle M varies from 63.2 to 68.3% and depends on the ratio of the semi-axes a and b.
8. The idea of determining the ship's position by measuring navigational parameters. Ways to determine the position of the vessel.
Determination of a place by two bearings:
The method of determining the position of the vessel by two bearings is one of the most common when sailing in narrow places or along the coast, near navigational hazards.
This is also explained by the fact that often in the visibility of the vessel there are not at the same time a large number of landmarks. The essence of the method is as follows. Bearings of two objects (lighthouses, signs, capes, etc.) are taken in quick succession. True bearings are calculated if there is a compass correction, and plotted on the map.
At the point of intersection of bearings there will be an observed position of the vessel F.
 A ∆ B ∆
A ∆ B ∆
This method has a number of advantages (simplicity and speed of determination), but also a number of disadvantages, the main of which is the complete lack of control in a single determination.
The value of the linear error of the observed place can be obtained from the formula for the systematic error e k hail, substituting the values of the gradients into it:
 ; ; And
; ; And  hail we get:
hail we get:
where AB is the distance between landmarks.
It can be seen from this formula that the value of FF 1 will increase with decreasing Q (with constant AB and e k). Therefore, at 30 o >Q>150 o , when sinQ decreases especially rapidly, the determination of the location by two bearings cannot be considered accurate.
Influence of random direction finding errors.
Direction finding, like any measurement, is accompanied by random errors, which include errors due to inaccurate pointing, oscillations at the moment of rolling, lack of stabilization in the vertical plane, etc. This leads to the fact that any measured bearing corresponds to an error  , deg. If such an error is substituted into the formula for estimating the accuracy of the observed place, then we get the formula for the mean square error of the observation for two bearings:
, deg. If such an error is substituted into the formula for estimating the accuracy of the observed place, then we get the formula for the mean square error of the observation for two bearings:  .
.
The formula shows that for small and close to 180 angles Q, the errors increase. Therefore, the place will be obtained more accurately at Q = 90 o. The accuracy of the determination also depends on the distance to the landmarks.
When determining the ship's position using two bearings, the error in the accepted compass correction can be much more than random errors.
To determine the correct value of the compass correction from the bearings of two objects, it is enough to find the value of its error, and then algebraically subtract this error from the accepted
compass correction values:  , where DК is the compass correction, DКpr is the accepted value of the compass correction, eк is the error of the received value with its sign.
, where DК is the compass correction, DКpr is the accepted value of the compass correction, eк is the error of the received value with its sign.
Determination of a place by three bearings.
When determining a place using three bearings, the bearings of three objects A, B, C are taken in quick succession. They are converted into true ones and plotted on the map. If the observations did not contain errors and the bearings were taken simultaneously, then all three bearings would intersect at one point F, which is the position of the vessel.
However, due to the inevitable action of a number of factors, the bearings usually do not intersect at one point, but form the so-called error triangle. Its appearance can be caused by various types of errors:
Misses when withdrawing an account and correcting compass bearings;
Errors in the recognition of landmarks;
Errors in accepted compass correction;
Random direction finding errors in the pad.
To avoid graphical errors during construction, it is possible to calculate the parallel shift of each position line when the correction is changed by 3 ... 5 ° and build a new error triangle by moving all position lines in the direction of increase or decrease. To calculate the displacement, it is necessary to remove the distances to each of the three objects from the map. Then:
 ,
,  ,
,  .
.
The influence of the error caused by non-simultaneous bearings can be eliminated in several ways. One of them is the correct choice of the order in which bearings are taken. The first direction finding can be objects located closer to the ship's centreline. The bearings of these landmarks change more slowly. If the bearings of the lights of beacons are taken, then the observation must be organized in such a way that one does not have to wait a long time for a flash of light if it is not the first to take the bearing. At speeds up to 15 knots, when laying is carried out on way charts, this is enough to eliminate errors from non-simultaneous direction finding. At high speeds or when laying on large-scale maps or plans, the bearing should be brought to the average moment for clarification. To do this, take five bearings in the following order, take bearings A, B and C, and then again bearings B and A in reverse order. Assuming that the bearings change linearly, the average value of the bearings of objects A and B is calculated.
 ,
,  .
.
compass correction the value of the parameter (course or bearing) is called, which compensates for the systematic error of its measurement. In general terms, a correction is a systematic error taken with the opposite sign.
The constant correction of the gyrocompass DGK for each landmark is determined as the difference between the true and average measured bearings:
Determination of distances at sea.
Distance at sea can be determined by several methods: using rangefinders, by vertical angle measured by a sextant, by radar data and by an eye gauge.
Rangefinders are optical instruments that measure the distance to a visible object based on various principles.
Determination of the ship's position by measured distances.
If there are two landmarks in the visibility of the ship, to which the distances are measured (by the vertical angle or according to the radar data), then the observed positions of the ship can be obtained by two distances. Let A and B be two objects to which the distances DA and DV are measured. It is known that the measured distance corresponds to an isoline - a circle with a radius equal to this distance and centered at the location of the landmarks. If both observations are made simultaneously, then, having laid two circles, at one of the points we will get the position of the vessel. The question of which of the two points to consider as a reserved place is easily solved by comparing it with a countable place.
The root-mean-square error of the observation of a place for two distances is obtained by substituting the values of the position line errors into the general formula, remembering that the distance gradient is equal to one.
Determination of the ship's position by bearing and distance.
This method is most often used when using radar. Usually, the bearing and distance are measured to one reference point, however, it may be more expedient to measure the bearing to a luminous beacon using a compass, and measure the distance to the coast. In the first case, the angle of intersection of the position lines will be equal to 90 o, and in the second case, the difference in the bearings taken from the map. The distance can be measured with a sextant along the vertical angle, or obtained approximately at the opening of the lighthouse or by eye, when sailing along the fairway or in narrow places.
To reduce the errors of non-simultaneity of observations, distances are first measured, and then the bearing is taken when the object is closer to the traverse and in the reverse order - at acute angles. The reserved place is obtained on the IP line at a distance from the object equal to D.
When measuring the bearing and distance to one reference point, the root-mean-square error of the ship's position is equal to (angle  )
)

When measuring the bearing and distance to different objects, you need to know the angle of intersection, then: 
9. Gradients of navigation parameters. Methods for assessing the accuracy of the ship's position in navigational determinations. UPC and 95% error at the ship's location. Practical consideration of errors in determining the position of the vessel for safe navigation. IMO requirements.
Any measurements contain errors, therefore, by measuring the bearing, distance or angle and placing the corresponding isoline on the map, it cannot be assumed that the vessel will be on this isoline. It is possible to calculate the possible displacement of the isoline due to errors using the concept of the gradient of a function.
Vector  called gradient is a vector directed along the normal to the navigation contour in the direction of its displacement with a positive increment of the parameter, and the modulus of this vector characterizes the highest rate of parameter change in this place. This module is:
called gradient is a vector directed along the normal to the navigation contour in the direction of its displacement with a positive increment of the parameter, and the modulus of this vector characterizes the highest rate of parameter change in this place. This module is:
 .
.
If, when measuring the navigation parameter v, an error Dv is made and the gradient is known, then the displacement of the position line is parallel to itself and is determined by the formula:
 .
.
The greater the value of the gradient g, the smaller the displacement of the line of position for the same error Dv, the more accurate the determination of the ship's position will be.
If during the measurement of the navigation parameter there was a random error m P, deg, then the error of the line of position can be found by the formula:
 .The position band, which is three times the average width, captures the ship's positions with a probability of 99.7%. This lane is called position limit band. Analytically
.The position band, which is three times the average width, captures the ship's positions with a probability of 99.7%. This lane is called position limit band. Analytically  calculated by the formula:
calculated by the formula:  , where d is an auxiliary angle.
, where d is an auxiliary angle.
The value of the angle d is obtained by calculating:
 .
.
The position line offset in miles is:  ,
,
where m'a is the angle error in arc minutes.
To prevent navigational accidents associated with grounding, along with other measures, attempts were made to normalize the requirements for the accuracy and frequency of observation, depending on navigation conditions. Repeated discussion of these issues in the International Maritime Organization (IMO) Maritime Safety Committee led to the creation of a navigation accuracy standard adopted in 1983 at the 13th IMO Assembly in resolution A.529.
The purpose of the adopted standard is to provide guidance to various kinds of administrations with navigation accuracy standards that should be used in evaluating the performance of systems designed to determine the position of a ship, including radio navigation systems, including satellite ones. The navigator is required to know his place at any time. The standard indicates the factors that affect the requirements for the accuracy of navigation. These include:
the speed of the ship, the distance to the nearest navigational danger, which is considered to be any recognized or charted element, the boundary of the navigation area.
When sailing in other waters at a speed of up to 30 knots, the current position of the vessel must be known with an error of no more than 4% of the distance to the nearest danger. In this case, the accuracy of the place should be estimated by the figure of errors, taking into account random and systematic errors with a probability of 95%. The IMO standard includes a table that contains the requirements for position accuracy, as well as the allowable sailing time according to dead reckoning, provided that the gyrocompass and log (swimming time) comply with IMO requirements, the dead reckoning has not been corrected, the errors have a normal distribution, and current and drift are taken into account with the possible accuracy.
10. Orthodromy, orthodromic correction. Methods for constructing an orthodrome on maps of the Mercator projection.
Orthodromic correction
When determining the IRP, the angle between the true meridian and the great circle arc is measured, along which the radio wave propagates from the source of its radiation M to the reception point K on the sphere (Fig. 13.4). The measured angle is the orthodromic bearing.
If on the Mercator projection from the place of the AD beacon we postpone, as is usually done, the line of the reverse RRP (RRP), then the position of the vessel will turn out not in the direction of MK, but in the direction of MKi.
In order for the bearing line drawn on the Mercator chart to pass through the ship's position K, the measured orbital bearing must be  converted to loxodromic bearing (Lok P) by adding the angle y to it, called the orgodromic correction:
converted to loxodromic bearing (Lok P) by adding the angle y to it, called the orgodromic correction:
Lok P \u003d IRP + y
The orthodromic correction is a correction for the curvature of the image of the arc of the great circle on the Mercator map. Let us find the value of this correction according to Fig. 13.5, depicting the Northern Hemisphere of the Earth with a great circle arc drawn on it through the points K and M. This arc makes with the meridians of the points K and M, respectively, the angles Ai and Ad. These angles are not equal to each other, since the arc of the great circle intersects the meridians at different angles.
The difference between the two spherical angles at which the great circle arc intersects the meridians of two given points is called the convergence of the meridians. The value of the convergence of the meridians of the points K and M can be found if we apply Napier's analogy to the KRM triangle. Based on it, you can write:
It can be seen from formula (13.7) that y cannot be greater than RD. With increasing latitude, the convergence of the meridians increases. The highest value equal to  longitude difference, the convergence of the meridians reaches at pm = 90°.
longitude difference, the convergence of the meridians reaches at pm = 90°.
The value of the orgodromic correction can be found by convergence  meridians in Fig. 13.6, depicting in the Mercator projection a part of the globe with points K and M, through which a great circle arc passes, forming angles Ai and Ad with the meridians of these points. On the Mercator projection, the arc of the great circle will be depicted as a curve with its convexity facing the nearest pole. The loxodrome passing through the points K and M intersects their meridians at the same angle K.
meridians in Fig. 13.6, depicting in the Mercator projection a part of the globe with points K and M, through which a great circle arc passes, forming angles Ai and Ad with the meridians of these points. On the Mercator projection, the arc of the great circle will be depicted as a curve with its convexity facing the nearest pole. The loxodrome passing through the points K and M intersects their meridians at the same angle K.
Let us assume that the distance between the points K and M is relatively small, as a result of which we can assume that the arc of the great circle passing through these points is represented by an arc of a circle. This assumption will be true with sufficient practical accuracy for distances up to several hundred miles. Then the arc of the great circle will make equal angles y with the loxodrome at points K and M.
From fig. 13.6 it can be seen that at point K the correction ip \u003d K-Ats at the point M correction gr \u003d A; - K. Summing up these equalities, we obtain 


This formula is approximate because, when deriving it, we assumed the equality of the orthodromic corrections at the points K and M. In reality, the orthodromic corrections at these points are not equal.
Substituting these data into formula (13.8) we get:

When solving various problems of navigation, it is most often necessary to find the loxodromic bearing at a given point with a known orthodromic bearing. This problem is solved by the algebraic formula (13.5).
The sign of the orthodromic correction depends on the relative position of the ship and the radio station being taken by it and is determined according to the following rule: if in the Northern Hemisphere the ship is located to the west of the radio station (the value of the bearing in a circular count is from 0 to 180 °), the orthodromic correction has a “+” sign; if the ship is located to the east of the radio station (bearing value is from 180 to 360 °), the orthodromic correction has a “-” sign. In the southern hemisphere, the rule of signs will be reversed (Fig. 13.7).

When deriving an approximate formula for the orthodromic correction, it was assumed that the arc of a great circle is depicted on the Mercator chart as an arc of a circle, as a result of which the orthodromic correction at both its ends will be the same. A more rigorous study of the issue of orthodromic correction shows that the great circle arc on the Mercator map is depicted by a curve that is not a circle, and the orthodromic correction at different ends of the great circle arc will be different.
At longer distances, when DA > 10°, the exact value of the orthodromic correction should be used. The exact value of the orthodromic correction can be found using the table. 23-6 MT-75, compiled according to the formula:
A 1 - orthodromic direction, determined from the expression (13.2).
It is possible to increase the accuracy of finding the orthodromic correction (at (р> 35 °) using the usual table compiled according to the approximate formula (13.8). This table should be entered not with the average latitude, but with the latitude of the point for which the orthodromic correction is located. the correction should be taken into account in all cases when its value is greater than the random errors of the gasket (they are usually taken equal to ± 0.3 °).
Notices to mariners. Contents of notices to mariners. Rules for correcting navigational charts.
Keeping charts and sailing guides up to date is called proofreading. Documents containing information about changes in the situation are called proofreading. They are issued by the bodies of the GUNiO MO in the form of issues of the Notice to Mariners (IM). The most important and urgent information is transmitted by radio. IM is published weekly in separate issues, each of which has its own serial number. Issue IM No. 1 comes out at the beginning of the year and should always be on board. On the title page of the IM issue, indicate the number and date of its publication, the IM numbers that are included in this issue and general reference information. The numbering of the notice during the calendar year is continuous. The list contains chart numbers, admiralty numbers and names of sailing directions, descriptions of lights and signs, radio navigation equipment and other navigation manuals and manuals, which must be corrected upon receipt of this issue.
The systematic process of correcting nautical charts and sailing manuals to bring them up to date is called proofreading maps and manuals. Among nautical charts, nautical charts are subject to correction, since it is on them that the elements most subject to change are contained, and these charts are used for direct calculations during navigation.
All sailing manuals are also corrected to a greater or lesser extent.
Depending on the volume and nature of the corrections, as well as on whether these corrections are made by the organization that issued the chart, or by the navigator himself, the following types of corrections to the Admiralty charts are distinguished on the ship:
1) new map (“New Chart” - NC). The new card is called:
a map showing an area not previously shown on any of the Admiralty maps;
map with modified cutting;
a map for a certain area on a scale different from the scale of maps already existing for this area;
a map showing depths in other units.
For maps published after November 1999 - under the lower outer frame on the left. The publication of a new chart is announced well in advance in the Weekly Issues of Notices to Mariners;
2) a new edition of the map ("New Edition" - NE). A new edition of a map is published when there is a large amount of new information or a large number of corrections to an existing map. The date of publication of the new edition of the map is indicated to the right of the date of publication of its first edition. For example:
On maps published after November 1999 - in a frame in the lower left corner of the map. The new edition of the map contains all the corrections that have appeared on the map since the publication of the previous edition. Since the release of the new edition, it is forbidden to use maps of previous editions;
3) urgent new edition ("Urgent New Edition" - UNE).
Such an edition is published when there is a lot of new information on the area of the chart, which is of great importance for the safety of navigation, but by its nature such information cannot be transferred to ships for correction in the Notices to Mariners. Due to urgency, such an edition may not contain all the corrections that have appeared on this chart since the last edition was printed, unless such information is critical for the safety of navigation in the area (see Chapter 2). Thus, an urgent new edition of the chart may need to be corrected according to the Weekly Notices to Mariners prior to its issue;
4) large proofreading (“Large correction"). If significant changes should be made not to the entire map, but only to one or several of its sections, the organization that issued the map makes a major correction of this map. The date of major revision is indicated to the right of the date of publication of the map. For example:
The major revision contains all previous minor revisions (see below) and those published in previous Weekly Notices to Mariners. Major map revisions were applied until 1972;
5) small proofreading (“Small correction"). Such corrections are periodically made by the organization that issued the card. With this type of correction, all corrections according to the Weekly Issues of Notices to Mariners issued after the publication of the map (the last of the new editions) or its Major Corrections, as well as technical corrections are applied to the chart. (“Bracketed Correction”). Information about minor corrections is given in the lower left corner of the map. For example, the map was corrected according to notice No. 2926 for 1991:
882 - 985/01
T&P Notices in Force
IMO requirement for the form and content of ship information about the ship's maneuvering properties. Pilot card.
The main properties of a particular vessel related primarily to its propulsion, agility and inertial braking
Sometimes, when interviewing 3 officers, I jokingly ask: “How does the morning start for the 3rd officer and for the captain?”
Young guys get lost and try to come up with something for my unexpected question.
I explain to them all that the captain's morning begins with a cup of aromatic coffee, and for the 3rd mate, the morning begins with a compass correction. A joke, of course, but with a grain of truth. This is what I want to talk about.
All navigators know that the compass correction must be determined every watch. How to do it?
In coastal navigation, when there are shore references, it is very easy and takes a few minutes. But what if the ship is on the open ocean? There is nothing around, only the sky, the ocean, seagulls and the captain, who is watching with interest how the 3rd assistant will solve the task. He probably considers you "GPS generation". As they say, everything ingenious is simple.
There is a quick and easy way to determine the compass correction from the lower or upper edge of the Sun. To do this, you need quite a bit - to set the direction finder from the side where the Sun sets, and at the moment when the last segment is hidden behind the horizon. After that, you should take the bearing, note the time, latitude, longitude and drive the data into the Navimate or Skymate computer program. If you do not want to blush in front of the captain, or at some inspection, then show the class and calculate the correction manually.
For this we need a manual called Nautical Almanac.
So, we take the bearing to the Sun, record the current time and coordinates, record the course using the gyro and magnetic compass.
Example:
Date: 03/19/2013 LMT(UTC+2): 17:46:30 Lat: 35-12.3 N Long: 35-55.0 E
Gyro bearing: 270.6 Heading 005 Magnetic heading 000
We bring the time to Greenwich Mean Time (2nd time zone) GMT 15:46:30
Finding GHA (Greenwich Hour Angle)
Finding DEC (declension)
To find them, go to the main table of the Almanac and find the current date. We write out GHA and DEC for the current hour, we also write out the correction d for the Sun (bottom right of the table). In our case, it is equal to 1.0.
Then you need to correct the Greenwich hour angle and declination with corrections for minutes and seconds.
This information can be found at the end of the book. The pages are titled minutes, and the GHA correction is given for each second. In the same place, on the right side, there is a correction for the declination, which is selected according to d.
M'S" = 11-37.5 corr = 0-00.8
Now we bring the Greenwich hour angle to the local time zone. To do this, we add (if E) or subtract (if W) our longitude:
GHA = 54-42.5 + Long 35-55.0
LHA = 90-37.5
Go to the Sight reduction table and select the values A, B, Z1:
A = 55.0 B = 0 Z1 = 0
For the second entry in the table, we need F and A.
To get F, you just need to add B and DEC (+/-).
We have a positive DEC if the declination and latitude signs are the same (N and N / S and S).
If we have different declination and latitude, then DEC is negative.
B=0
DEC=0-20.6S
F = 359 39.4 (round up to 360)
Now, having F and A, we enter the same table for the second and last time, and write out the second component of the Z2 azimuth:
Z2 = 90
Then we add Z1 and Z2 and get a semi-circular azimuth Z:
Z = 0 + 90 = 90
We translate the semicircular azimuth into circular using the rule:
For north latitude, if LHA is greater than 180: Zn = Z, if LHA is less than 180: Zn = 360 Z
For South latitude, if LHA is greater than 180: Zn = 180 - Z, if LHA is less than 180: Zn = 180 + Z
In our case, Zn = 360 - 90 = 270
The required bearing is found. Subtract our compass bearing 270 - 270.6 = - 0.6W
In order not to get confused in the order of calculations, I give the algorithm:
- We make calculations, write down the bearing, position, time, and course.
- Convert local time to Greenwich Mean Time.
- We select from the tables the value of LHA and Dec.
- We correct them by corrections for minutes and seconds.
- We select values A, B, Z1 from the table.
- Calculate F, and choose from table Z2.
- We find the azimuth and translate it into a circular one.
- We find the compass correction (true bearing minus compass).
- WE HANG A LARGE ASTRONOMIC MEDAL ON OUR CHEST.
At first glance, everything looks cumbersome and incomprehensible. But after a couple of practical calculations, everything will fall into place.
By the way, making a compass correction at sunset a, you will have a unique chance to see a green beam. The fact is that at sunset, at the moment when the Sun is hiding behind the horizon, due to refraction and refraction of color, it is very rare, but you can observe a green beam for several seconds. This mysterious, enigmatic and very rare phenomenon is reflected in numerous legends of different peoples, and overgrown with legends and predictions.
For example, according to one of the legends, the one who saw the green ray will receive a promotion, prosperity, and will be able to meet the one with whom he will meet his happiness.
And this is not a story, since the Captain, having seen and appreciated the efforts, as well as the literacy of the young navigator, of course, will recommend him for a promotion.
So determining the compass correction by sunset is a direct path to promotion and, as a result, to well-being and happiness.
I wish all young navigators a calm sea, career advancement, and a return to their native shores. May the green beam bring you happiness in your life.
Question #9
ASTRONOMICAL DEFINITION OF COMPASS CORRECTION
Determining the compass correction (∆K) at sea is one of the most important tasks in navigation. Without knowing the correct value of ∆K, the navigator is not able to provide the necessary accuracy of dead reckoning, as well as navigational observations. As you know, ship compass corrections are determined by coastal alignments. However, over time, for various reasons, the correction values of gyroscopic and especially magnetic compasses undergo changes. As a result, when the ship is on a voyage, it is necessary to systematically determine the correct values of compass corrections. In the open sea, this can only be done by the heavenly bodies, i.e. astronomical methods.
To determine the compass correction in the sea, it is necessary to obtain the true direction to the luminary C, i.e., its IP (Fig. 99), and the compass direction to the luminary, i.e., its KP, then the value and sign of ΔK are determined by the formula ΔK = IP - KP.
The true bearing of the luminary, equal to its azimuth in a circular count, in the sea is calculated by formulas, tables, nomograms, instruments or computers. Azimuth is a function of three arguments, i.e.
A \u003d A 1 (φ, δ, t) \u003d A 2 (φ, δ, h) \u003d A 3 (φ, h, t)
In practice, two methods of observation can be applied: the method of moments and the method of heights. In the first case, simultaneously with taking the CP, the exact Grivich time is noticed, and in the second, the height of the direction-finding luminary is measured.
Method of moments. If, during the direction finding of the luminary, a chronometer moment is noticed and taken from the map φ c , λ c , then the following elements can be obtained in the parallactic triangle PnZC:
Side 90 - φ c , where φ c is removed from the map according to the observed Ts and ol;
Side 90- , where it is selected from the MAE according to T gr of observations, is removed from the map;
Angle = ![]() where is selected from MAE according to T gr of observations, is removed from the map.
where is selected from MAE according to T gr of observations, is removed from the map.
Therefore, with these three known elements, the azimuth of the star can be calculated from the triangle PnZC using the cotangent formula:
ctg A \u003d tg δ cos φ c cosec t M - sin φ c ctg t M . (1.1)
According to this formula, the azimuth is calculated in a semicircular account, transferred to a circular account and taken as IP. However, to obtain the azimuth from three known values φ c, and more often special tables are used.
Height method.
If, during the direction finding of the luminary, its height h is measured, then the azimuth can be calculated from the other three known sides of the parallactic triangle. Using the formula for the cosine of the side PnC
cos A \u003d sin δ sec φ c sec h - tg φ c tg h
Used when the height can be calculated in advance
Method of heights and moments. If, after observing the heights of the luminary, we take its bearing by compass and notice Txp, then simultaneously with obtaining the position of the vessel or the line of position, one can also obtain a compass correction.
To calculate h and A, a system of formulas is used:

applies if the height of the luminary is obtained previously, and the azimuth is calculated along the way.
The method of heights and moments is also used in determining ΔK from the North Star, but its height is not measured, but is taken equal to φ.


DEFINITION OF THE COMPASS CORRECTION. GENERAL CASE
When the luminaries are visible, the compass correction can be determined at any time of the day using the method of moments, which is the general case of determining the compass correction. To determine the compass correction in this way, any luminary can be used, regardless of the magnitude of its declination. Observations can be made both day and night, at any latitude. All this allows us to consider the method universal.
The formula for calculating the azimuth (1.1) is non-logarithmic and, when calculating, requires the study of signs.
preliminary operations. Choice of observation conditions. At the scheduled time, pick up a luminary with a height of up to 10 ° (and not more than 20 °) using a star globe or by eye. Checking instruments, Observations. Observe a series of three bearings and a CP. Get navigational information: Тс, ol, φ , λ, КК, ΔК.
Processing of observations. Analyze ΔK; compare with the accepted constant - the discrepancies should not exceed the heading accuracy (from ± 0.3 ° in good conditions, up to 1.5 ° - in bad ones);
VAS-58. TVA-57. COMPUTER.
 AT SUNRISE (SUNSET) OF THE SUN
AT SUNRISE (SUNSET) OF THE SUN
At the moment the upper edge of the Sun touches the line of the visible horizon, the center of the luminary is located below the true horizon, i.e. has a negative height. With the height of the observer's eye e=12m, which is the most typical for most ships, the decrease in the center of the Sun at the time of its apparent sunrise or sunset is 57.8 minutes. It consists of the inclination of the horizon, the mean half-diameter, parallax and refraction. With a known decrease, the azimuths of the Sun at the moment of its apparent sunrise or sunset can be calculated in advance using the method of heights. These azimuth values calculated by the converted formula are given in tables 20a and 20b of MT-75.
Selection of tabular azimuth from tab. 20a and 20b are produced from the latitude and declination of the sun, with interpolation in both arguments. Table 20a includes the latitude and declination of the same name, and Table 20b the opposite latitude. Azimuths are obtained in a semicircular account. In northern latitude, the name of the azimuth will be NO at sunrise and NW at sunset. In the southern hemisphere, SO at sunrise and SW at sunset. The obtained compass corrections at the moment of apparent sunrise or sunset in practice are reduced to the following. With the help of MAE, pre-ship time of sunset (sunrise) is calculated and the compass plane of the upper edge of the star is taken at the moment it touches the line of the visible horizon.
The order of work in determining ΔK by sunrise (sunset) of the Sun.
1. Observe the bearing of the Sun at the moment of its appearance (or sinking) on the horizon of its upper edge.
3. Enter the table. 20-a with the same φ and λ or 20-6 with opposite names and choose the closest to φ and λ value At. Interpolate the azimuth along b and f and apply corrections to A g. Assign the name to the resulting azimuth in a semicircular account and translate it into a circular account.
5. Analyze ΔK. comparison with the previously accepted one and evaluate possible errors in determining the AC-
 Determination of the compass correction from the observations of the North Star.
Determination of the compass correction from the observations of the North Star.
When sailing in low northern latitudes, the North Star is a convenient object for determining the compass correction. Since the polar distance ∆ = 90 - of this star is approximately 0.9 degrees, then in the daily movement it describes a parallel around the North Pole of the world, the spherical radius of which is very small. As a result, the height of the North Star at any moment remains close to the height of the pole, or, which is all the same, to the latitude of the observer. The azimuths of Polaris vary slightly and can range from 0 at the culmination of the star to 1.2 degrees NO or NW at elongations for latitudes less than 35 degrees. These circumstances make it possible to obtain a simplified formula for calculating the azimuth of the North Star.
Determining compass corrections according to the North Star is possible at latitudes from 0 to 15 N with direct direction finding of the star and up to 40-50 degrees N when using a reflective mirror.
Observations consist in obtaining three to five compass bearings of the star, taken in quick succession. The time of observations, due to the slow change in azimuth, can be noted on the ship's clock with an accuracy of 5 minutes. It is enough to know the numeral coordinates of the vessel with an accuracy of 1 degree.
Having calculated the GMT time T gr of observations, choose from MAE the Greenwich sidereal time S gr, which is converted by longitude into local Sm. The azimuth of the star selected from the table is converted into a circular account.
Example 73. May 5, 1977 in the South China Sea, following QC= 190° (+1°), V= 17 knots, determine AGK" along the Polar.
Solution. 1. Observations. Near T in = 2 h 13 m (№ = -9) took the direction of the Polar - GKP= 359.6°; f = 18° N; X = 116° 0 s ".
2. Processing of observations: