Candidate of Physical and Mathematical Sciences V. POGOZHEV.
(End. Beginning, see "Science and Life" No.)
We publish the last part of the tasks on the topic "Mechanics". The next article will be devoted to oscillations and waves.
Problem 4 (1994). From a hill, smoothly turning into a horizontal plane, from a height h slides off a small smooth washer of mass m. On a plane there is a smooth movable hill of mass M and height H> h. The sections of the slides by a vertical plane passing through the centers of mass of the washer and the movable slide have the form shown in the figure. What is the maximum height X Can the puck go up the fixed slide after it slides off the moving slide for the first time?
Solution. The slide, on which the puck was originally located, is motionless by the condition of the problem and, therefore, is rigidly fastened to the Earth. If, as is usually done when solving such problems, only the interaction forces of the puck with the slides and the force of gravity are taken into account, the problem can be solved using the laws of conservation of mechanical energy and momentum. The laboratory frame of reference, as already noted in the solution of previous problems (see "Science and Life" No. ), can be considered inertial. We will divide the solution of the problem into three stages. At the first stage, the puck begins to slide from a fixed slide, at the second stage it interacts with a movable slide, and at the last stage it rises up the fixed slide. It follows from the conditions of the problem and the assumptions made that the puck and the movable slide can only move forward so that their centers of mass remain in the same position all the time. vertical plane.
Given the above and the fact that the puck is smooth, the system "Land with a fixed hill - the puck" during the first stage should be considered isolated and conservative. Therefore, according to the law of conservation of mechanical energy, the kinetic energy of the puck W k = mv 1 2 /2 when it moves along a horizontal plane after sliding down the hill should be equal to mgh, Where g- acceleration value free fall.
During the second stage, the puck will first begin to rise along the movable slide, and then, having reached a certain height, slide off it. This statement follows from the fact that, as a result of the interaction of the puck with the movable slide, the latter, as already mentioned, by the end of the second stage should move forward with a certain speed u, moving away from a fixed slide, that is, in the direction of speed v 1 puck at the end of the first stage. Therefore, even if the height of the movable slide were equal to h, the puck would not be able to overcome it. Considering that the reaction force from the side of the horizontal plane to the movable slide, as well as the gravity forces acting on this slide and the puck, are directed vertically, based on the law of conservation of momentum, it can be argued that the projection v 2 puck speeds at the end of the second stage per speed direction v 1 puck at the end of the first stage must satisfy the equation
mυ 1 = mυ 2 + M And (1)
On the other hand, according to the law of conservation of mechanical energy, these speeds are related by the relation
![]() , (2)
, (2)
since the system "Earth - movable slide - puck" turns out to be isolated conservative under the assumptions made, and its potential energy at the beginning and at the end of the second stage is the same. Taking into account that after interaction with a movable slide, the speed of the puck in the general case should change ( v 1 - v 2 ≠ 0), and using the formula for the difference of the squares of two quantities, from relations (1) and (2) we obtain
υ 1 + υ 2 = And (3)
and then from (3) and (1) we determine the projection of the speed of the puck at the end of the second stage on the direction of its speed before the start of interaction with the moving slide
It can be seen from relation (4) that v 1 ≠ v 2 at m≠ M and the puck will move towards the fixed hill after sliding off the movable one only when m< M.
Applying again the law of conservation of mechanical energy for the system "Earth with a fixed hill - puck", we determine the maximum height of the puck lifting along a fixed hill X =v 2 2 /2g. After the simplest algebraic transformations, the final answer can be represented as

Task 5(1996). A smooth block of mass M attached to a vertical wall with a light stiffening spring k. With an undeformed spring, the bar end touches the face of the cube, the mass m which is much less M. The axis of the spring is horizontal and lies in a vertical plane passing through the centers of mass of the cube and the bar. By shifting the bar, the spring is compressed along its axis by the value ∆ x, after which the block is released without initial velocity. How far will the cube move after a perfectly elastic impact if the coefficient of friction of the cube on the plane is sufficiently small and equal to μ?
Solution. We will assume that the standard assumptions are fulfilled: the laboratory frame of reference, relative to which all bodies were initially at rest, is inertial, and only the forces of interaction between them and gravity act on the bodies under consideration, and, in addition, the plane of contact between the bar and the cube is perpendicular to the axis of the spring. Then, taking into account the position of the spring axis and the centers of mass of the bar and the cube given in the condition, we can assume that these bodies can only move forward.
After releasing, the bar begins to move under the action of a compressed spring. At the moment the bar touches the cube, according to the condition of the problem, the spring should become undeformed. Since the block is smooth and moves along a horizontal plane, the forces of gravity and the reactions of the plane do no work on it. According to the condition, the mass of the spring (and therefore the kinetic energy of its moving parts) can be neglected. Consequently, the kinetic energy of a translationally moving bar at the moment it touches the cube should become equal to the potential energy of the spring at the moment the bar is released, and therefore the speed of the bar at this moment should be equal to .
When the bar touches the cube, they collide. In this case, the friction force acting on the cube changes from zero to m mg, Where g- the magnitude of the free fall acceleration. Assuming, as usual, that the time of impact of the bar and the cube is small, we can neglect the momentum of the friction force acting on the cube from the side of the plane, compared with the momentum of the force acting on the cube from the side of the bar during the impact. Since the displacement of the bar during the impact is small, and at the moment the cube touches the spring is not deformed according to the condition of the problem, we assume that the spring does not act on the bar during the impact. Therefore, the system "bar - cube" during the collision can be considered closed. Then, according to the law of conservation of momentum, the relation
Mv= M U + m u, (1)
Where U And u- respectively, the speed of the bar and the cube immediately after the collision. The work of the forces of gravity and the normal component of the reaction forces of the plane acting on the cube and the bar is equal to zero (these forces are perpendicular to their possible movements), the impact of the block on the cube is ideally elastic, and due to the short duration of the impact, the displacement of the cube and the block (and, consequently, the work of the friction forces and deformation of the spring) can be neglected. Therefore, the mechanical energy of the system under consideration must remain unchanged and the equality takes place
M υ 2/2 = MU 2/2 + mi 2 /2 (2)
Determining from (1) the speed of the bar U and substituting it into (2), we get 2 Mvu=(M+m)u 2 , and since by the condition of the problem m << M, then 2 vu=u 2. Hence, taking into account the possible direction of motion, it follows that the cube after the collision acquires a speed, the value of which
![]() (3)
(3)
and the speed of the block remains unchanged and equal to v. Therefore, after the impact, the speed of the cube must exceed the speed of the bar twice. Therefore, after hitting the cube in the horizontal direction until it stops, only the sliding friction force μ mg and, consequently, the cube will move uniformly with acceleration μ g. On the bar after the collision in the horizontal direction, only the elastic force of the spring acts (the bar is smooth). Therefore, the speed of the block changes according to the harmonic law, and while the cube is moving, it is ahead of the block. It follows from the above that the bar from the equilibrium position can be displaced by a distance ∆ X. If the coefficient of friction μ is small enough, there will be no repeated collision of the bar with the cube, and therefore the required displacement of the cube should be
L = And 2 / 2μg = 2 k(∆x) 2 / μ M g.
Comparing this distance with ∆ X, we get that the given answer is correct for μ ≤ 2 k ∆x/Mg
Task 6(2000). On the edge of the board lying on a smooth horizontal plane, put a small washer, the mass of which is k times less than the mass of the board. The puck is clicked into motion toward the center of the board. If this speed is greater u, then the puck slides off the board. How fast will the board move if the speed of the puck is n times more u (n> 1)?
Solution. When solving the problem, as usual, we will neglect the influence of air and assume that the frame of reference associated with the table is inertial, and the puck moves forward after the impact. Note that this is only possible if the line of action of the external force impulse and the center of mass of the puck lie in the same vertical plane. Since, according to the condition of the problem, the washer at an initial speed less than u, does not slide off the board, it must be assumed that when the puck slides along the board, friction forces act between them. Taking into account that after the click the puck moves along the board to its center, and the sliding friction force is directed antiparallel to the speed, it can be argued that the board should also begin to move forward on the table. From the above and the law of conservation of momentum (since the board is on a smooth horizontal plane) it follows that the speed of the puck immediately after the click is u sh, her speed v w and board speed V e at the moment of slipping, the washers must satisfy the relation
mu w = M V d + mv w,(1)
Where m is the mass of the puck, and M- the mass of the board, if u w > u. If u w ≤ u, then, according to the condition of the problem, the puck does not slide off the board, and, therefore, after a sufficiently long period of time, the speeds of the board and the puck should become equal. Assuming, as usual, the value of the dry friction force of sliding does not depend on the speed, neglecting the dimensions of the washer and taking into account that the movement of the washer relative to the board by the moment of sliding does not depend on its initial speed, taking into account the above and based on the law of change in mechanical energy, we can state that what at u w ≥ u
mu w 2 / 2 = MV d 2 / 2 + mυ w 2 / 2 + A,(2)
Where A- work against friction forces, and at u w > u V d< v w, and at u w = u V d = v sh. Considering that, according to the condition M/m=k, from (1) and (2) with u w = u after algebraic transformations we get
and since at u w = nu from (1) it follows that
υ w 2 = n 2 And 2 + k 2 V d 2 - 2 nki V d (4)
the desired speed of the board must satisfy the equation
k(k + 1) V d 2 - 2 nkv d + ki 2 /(k + 1) = 0. (5)
It is obvious that at n→∞ the time of interaction of the puck with the board should tend to zero and, therefore, the desired speed of the board as it increases n(after it exceeds some critical value) should decrease (up to zero). Therefore, out of two possible solutions equation (5) satisfies the conditions of the problem
Physics problem - 4424
2017-10-21
A light spring of stiffness $k$ is attached to a bar of mass $m$ lying on a horizontal plane, the other end of which is fixed so that the spring is not deformed, and its axis is horizontal and passes through the center of the mass of the bar. The bar is mixed along the spring axis by a distance $ \Delta L$ and released without initial speed. Find the maximum speed of the bar if its coefficient of friction on the plane is equal to $\mu$.
Solution:
We will assume that for a given mixing of the bar, the deformation of the spring is fully elastic. Then, on the basis of Hooke's law, we can assume that the force $F_(pr) = k \Delta L$, directed horizontally along the spring axis, acts on the bar from the side of the spring at the moment of release. The reaction force of the plane acting on the bar can be represented as two components: perpendicular and parallel to this plane. The value of the normal component of the reaction force $N$ can be determined on the basis of Newton's second law, assuming that the frame of reference fixed relative to this plane is inertial, and the bar can only move along this plane. Neglecting the action on the "bar of air, we get: $N - mg = 0$, where $g$ is the value of the free fall acceleration. According to Coulomb's law, with a fixed bar, the maximum value of the parallel component of the reaction force - the force of dry static friction - is equal to $\mu N $. Therefore, for $k \Delta L \leq \mu mg$, the bar must remain motionless after releasing. If $k \Delta L > \mu mg$, then after releasing the bar, the bar will begin to move with some acceleration. Since the line of action of the force co side of the spring passes through the center of mass of the bar, and the friction force is directed opposite to its speed, the bar will move translationally. In this case, the deformation of the spring will decrease, and, consequently, the acceleration of the bar should also decrease. At the moment when the sum of the forces acting on the bar turns into If, as usual, we assume that the value of the force of dry sliding friction does not depend on the speed and is equal to the maximum value of the force of dry friction of rest, then, neglecting the mass of the spring in accordance with the condition of the problem, the value of the deformation $\Delta x $ springs at the moment of interest to us can be easily calculated from the relation $k \Delta x = \mu mg$. Remembering the expressions for calculating the kinetic energy of a translationally moving solid body, potential energy of an elastically deformed spring, and taking into account that the displacement of the bar by this moment will become equal to $\Delta L - \Delta x$, based on the law of change in mechanical energy, it can be argued that the maximum speed $v_(max)$ of the bar must satisfy the equation:
$\frac(k \Delta L^(2))(2) = \frac(k \Delta x^(2))(2) + \frac(mv_(max)^(2))(2) + \ mu mg (\Delta L - \Delta x)$.
From what has been said, it follows that the maximum speed of the bar, under the assumptions made, should be equal to
$v_(max) = \begin(cases) 0, & \text(when) k \Delta L \leq \mu mg \\ \sqrt( \frac(k)(m)) \left (\Delta L - \ frac( \mu mg)(k) \right) & \text(at) k \Delta L > \mu mg \end(cases)$.
Free vibrations are made under the action of the internal forces of the system after the system has been brought out of equilibrium.
In order to free vibrations were made according to the harmonic law, it is necessary that the force tending to return the body to the equilibrium position should be proportional to the displacement of the body from the equilibrium position and directed in the direction opposite to the displacement (see § 2.1):
Forces of any other physical nature that satisfy this condition are called quasi-elastic .
Thus, a load of some mass m attached to the stiffening spring k, the second end of which is fixed motionless (Fig. 2.2.1), constitute a system capable of performing free harmonic oscillations in the absence of friction. The mass on the spring is called linear harmonic oscillator.
The circular frequency ω 0 of free vibrations of a load on a spring is found from Newton's second law:
With a horizontal arrangement of the spring-load system, the force of gravity applied to the load is compensated by the reaction force of the support. If the load is suspended on a spring, then the force of gravity is directed along the line of movement of the load. In the equilibrium position, the spring is stretched by an amount x 0 equal to
Therefore, Newton's second law for a load on a spring can be written as
Equation (*) is called the equation of free vibrations . It should be noted that physical properties oscillatory system determine only the natural frequency of oscillations ω 0 or the period T . Such parameters of the oscillation process as amplitude x m and initial phaseφ 0 , are determined by the way in which the system was brought out of equilibrium at the initial moment of time.
If, for example, the load was displaced from the equilibrium position by a distance Δ l and then at time t= 0 released without initial speed, then x m = ∆ l, φ 0 = 0.
If, however, the initial speed ± υ 0 was imparted to the load, which was in the equilibrium position, with the help of a sharp push, then,
So the amplitude x m free oscillations and its initial phase φ 0 are determined initial conditions .
There are many varieties of mechanical oscillatory systems that use the forces of elastic deformations. On fig. 2.2.2 shows the angular analogue of a linear harmonic oscillator. A horizontally located disk hangs on an elastic thread fixed in its center of mass. When the disk rotates through an angle θ, a moment of forces arises M elastic torsion strain:
Where I = I C - moment of inertia of the disk about the axis passing through the center of mass, ε - angular acceleration.
By analogy with the load on the spring, you can get:
Free vibrations. Mathematical pendulum
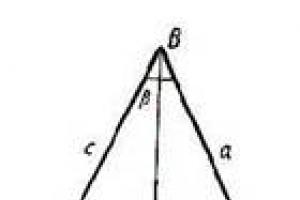
Mathematical pendulum called a body of small size, suspended on a thin inextensible thread, the mass of which is negligible compared to the mass of the body. In the equilibrium position, when the pendulum hangs on a plumb line, the force of gravity is balanced by the force of the thread tension. When the pendulum deviates from the equilibrium position by a certain angle φ, a tangential component of gravity appears F τ = - mg sin φ (Fig. 2.3.1). The minus sign in this formula means that the tangential component is directed in the direction opposite to the pendulum deflection.
If denoted by x linear displacement of the pendulum from the equilibrium position along the arc of a circle of radius l, then its angular displacement will be equal to φ = x / l. Newton's second law, written for the projections of the acceleration and force vectors on the direction of the tangent, gives:
This relation shows that the mathematical pendulum is a complex non-linear system, since the force tending to return the pendulum to its equilibrium position is proportional to the non-displacement x, A
Only in case small fluctuations when close can be replaced by a mathematical pendulum is a harmonic oscillator, i.e., a system capable of performing harmonic oscillations. In practice, this approximation is valid for angles of the order of 15-20°; while the value differs from no more than 2%. Pendulum oscillations at large amplitudes are not harmonic.
For small oscillations of a mathematical pendulum, Newton's second law is written as
This formula expresses natural frequency of small oscillations of a mathematical pendulum .
Hence,
|

Any body mounted on a horizontal axis of rotation is capable of performing free oscillations in the gravitational field and, therefore, is also a pendulum. Such a pendulum is called physical (Fig. 2.3.2). It differs from the mathematical one only in the distribution of masses. In a position of stable equilibrium, the center of mass C of the physical pendulum is below the axis of rotation O on the vertical passing through the axis. When the pendulum deviates by an angle φ, a moment of gravity arises, tending to return the pendulum to the equilibrium position:
and Newton's second law for a physical pendulum becomes (see §1.23)
Here ω 0 - natural frequency of small oscillations of a physical pendulum .
Hence,
Therefore, the equation expressing Newton's second law for a physical pendulum can be written as
Finally, for the circular frequency ω 0 of free oscillations of the physical pendulum, the following expression is obtained:
|

Energy transformations during free mechanical vibrations
With free mechanical vibrations, the kinetic and potential energies change periodically. At the maximum deviation of the body from the equilibrium position, its velocity, and hence the kinetic energy, vanishes. In this position, the potential energy of the oscillating body reaches its maximum value. For a load on a spring, the potential energy is the energy of the elastic deformation of the spring. For a mathematical pendulum, this is the energy in the Earth's gravitational field.
When the body in its motion passes through the equilibrium position, its speed is maximum. The body skips the equilibrium position according to the law of inertia. At this moment, it has the maximum kinetic and minimum potential energy. An increase in kinetic energy occurs at the expense of a decrease in potential energy. With further movement, the potential energy begins to increase due to the decrease in kinetic energy, etc.
Thus, during harmonic oscillations, a periodic transformation of kinetic energy into potential energy and vice versa occurs.
If there is no friction in the oscillatory system, then the total mechanical energy during free vibrations remains unchanged.
For spring load(see §2.2):
In real conditions, any oscillatory system is under the influence of friction forces (resistance). In this case, part of the mechanical energy is converted into the internal energy of the thermal motion of atoms and molecules, and the vibrations become fading (Fig. 2.4.2).
The damping rate of the oscillations depends on the magnitude of the friction forces. The time interval τ during which the oscillation amplitude decreases in e≈ 2.7 times, called decay time .
The frequency of free oscillations depends on the damping rate of the oscillations. As the friction forces increase, the natural frequency decreases. However, the change in the natural frequency becomes noticeable only at sufficiently large friction forces, when the natural oscillations quickly decay.
An important characteristic of an oscillatory system that performs free damped oscillations is quality factor Q. This parameter is defined as a number N total oscillations made by the system during the damping time τ, multiplied by π:
Thus, the quality factor characterizes the relative loss of energy of the oscillatory system due to the presence of friction over a time interval equal to one oscillation period.
Forced vibrations. Resonance. Self-oscillations
Oscillations that occur under the influence of an external periodic force are called forced.
External force performs positive work and provides an influx of energy to the oscillatory system. It does not allow oscillations to fade, despite the action of friction forces.
A periodic external force can vary in time according to various laws. Of particular interest is the case when an external force, changing according to a harmonic law with a frequency ω, acts on an oscillatory system capable of performing natural oscillations at a certain frequency ω 0 .
If free oscillations occur at a frequency ω 0, which is determined by the parameters of the system, then steady forced oscillations always occur at frequency ω of the external force.
After the beginning of the impact of external force on the oscillatory system, some time Δ t to establish forced oscillations. The settling time is equal in order of magnitude to the decay time τ of free oscillations in the oscillatory system.
At the initial moment, both processes are excited in the oscillatory system - forced oscillations at a frequency ω and free oscillations at a natural frequency ω 0 . But free vibrations are damped due to the inevitable presence of friction forces. Therefore, after some time, only stationary oscillations at the frequency ω of the external driving force remain in the oscillatory system.
Consider, as an example, forced vibrations of a body on a spring (Fig. 2.5.1). An external force is applied to the free end of the spring. It forces the free (left in Fig. 2.5.1) end of the spring to move according to the law
If the left end of the spring is displaced by a distance y, and the right one - at a distance x from their original position, when the spring was not deformed, then the elongation of the spring Δ l equals:
In this equation, the force acting on the body is represented as two terms. The first term on the right side is the elastic force tending to return the body to the equilibrium position ( x= 0). The second term is the external periodic impact on the body. This term is called compelling force.
The equation expressing Newton's second law for a body on a spring in the presence of an external periodic action can be given a rigorous mathematical form, if we take into account the relationship between the acceleration of the body and its coordinate: Then will be written in the form
Equation (**) does not take into account the action of friction forces. Unlike free oscillation equations(*) (see §2.2) forced vibration equation(**) contains two frequencies - the frequency ω 0 of free oscillations and the frequency ω of the driving force.
The steady forced vibrations of the load on the spring occur at the frequency of the external action according to the law
|
Amplitude of forced vibrations x m and the initial phase θ depend on the ratio of the frequencies ω 0 and ω and on the amplitude y m external force.
At very low frequencies, when ω<< ω 0 , движение тела массой m, attached to the right end of the spring, repeats the movement of the left end of the spring. Wherein x(t) = y(t), and the spring remains practically undeformed. The external force applied to the left end of the spring does not do work, since the modulus of this force at ω<< ω 0 стремится к нулю.
If the frequency ω of the external force approaches the natural frequency ω 0 , there is a sharp increase in the amplitude of forced oscillations. This phenomenon is called resonance . Amplitude dependence x m forced oscillations from the frequency ω of the driving force is called resonant characteristic or resonance curve(Fig. 2.5.2).
At resonance, the amplitude x m load fluctuations can be many times greater than the amplitude y m oscillations of the free (left) end of the spring, caused by an external action. In the absence of friction, the amplitude of forced oscillations at resonance should increase indefinitely. In real conditions, the amplitude of steady-state forced oscillations is determined by the condition: the work of an external force during the period of oscillations must be equal to the loss of mechanical energy over the same time due to friction. The less friction (i.e., the higher the quality factor Q oscillatory system), the greater the amplitude of forced oscillations at resonance.
For oscillatory systems with a not very high quality factor (< 10) резонансная частота несколько смещается в сторону низких частот. Это хорошо заметно на рис. 2.5.2.
The phenomenon of resonance can cause the destruction of bridges, buildings and other structures, if the natural frequencies of their oscillations coincide with the frequency of a periodically acting force, which has arisen, for example, due to the rotation of an unbalanced motor.
Forced vibrations are undamped fluctuations. The inevitable losses of energy due to friction are compensated by the supply of energy from an external source of a periodically acting force. There are systems in which undamped oscillations arise not due to periodic external influence, but as a result of the ability of such systems to regulate the flow of energy from a constant source. Such systems are called self-oscillating, and the process of undamped oscillations in such systems - self-oscillations . In a self-oscillatory system, three characteristic elements can be distinguished - an oscillatory system, an energy source and a feedback device between the oscillatory system and the source. As an oscillatory system, any mechanical system capable of performing its own damped oscillations (for example, a pendulum of a wall clock) can be used.
The energy source can be the deformation energy of the spring or the potential energy of the load in the gravitational field. The feedback device is a mechanism by which the self-oscillatory system regulates the flow of energy from the source. On fig. 2.5.3 shows a diagram of the interaction of various elements of a self-oscillating system.
An example of a mechanical self-oscillating system is a clockwork with anchor move (Fig. 2.5.4). A running wheel with oblique teeth is rigidly fastened to a toothed drum, through which a chain with a weight is thrown. Attached to the upper end of the pendulum anchor(anchor) with two plates of hard material, curved along an arc of a circle with a center on the axis of the pendulum. In a wristwatch, the weight is replaced by a spring, and the pendulum is replaced by a balancer - a handwheel fastened to a spiral spring. The balancer performs torsional vibrations around its axis. The oscillatory system in the clock is a pendulum or balancer.
The source of energy is a weight lifted up or a wound spring. The feedback device is an anchor that allows the running wheel to turn one tooth in one half cycle. Feedback is provided by the interaction of the anchor with the running wheel. With each oscillation of the pendulum, the travel wheel tooth pushes the anchor fork in the direction of the pendulum movement, transferring to it a certain portion of energy, which compensates for the energy losses due to friction. Thus, the potential energy of the weight (or twisted spring) is gradually, in separate portions, transferred to the pendulum.
Mechanical self-oscillatory systems are widespread in the life around us and in technology. Self-oscillations are performed by steam engines, internal combustion engines, electric bells, strings of bowed musical instruments, air columns in the pipes of wind instruments, vocal cords when talking or singing, etc.
 |
| Figure 2.5.4. Clock mechanism with a pendulum. |